Eng
Eng 中文
中文在机器视觉中,获得一张高质量的可处理图像至关重要。机器视觉系统之所以成功,首先要保证图像质量好,特征明显。反之,如果图像质量不好,特征不明显,会使机器视觉系统变得不可靠或鲁棒性不高,甚至导致项目失败。因此,光源选择技能是必须的,下面,仰望科技为大家介绍光源选型的基本要素:
1. 光源颜色
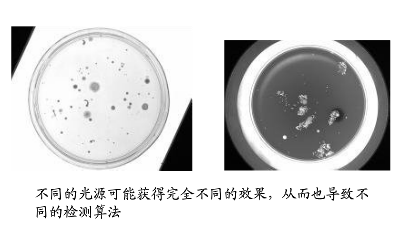
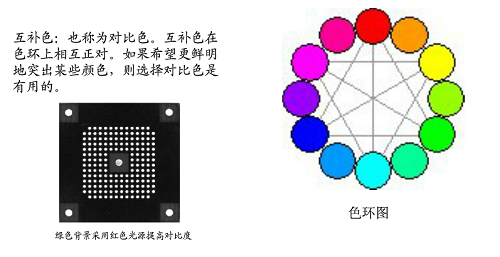
良好的光源颜色选择可以使需要被观察的特征与需要被忽略的图像特征之间产生最大的对比度,即,特征与其周围的区域之间有足够的灰度量区别,从而易于特征的区分。为了最大程度区分被观察物和背景,通常选择互补色光源,例如,当被观察物为绿色时,选择红色光源背景能提高对比度。
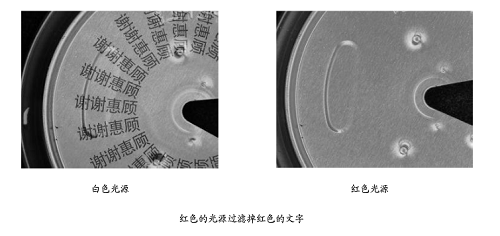
当被观察物中混杂一些我们不希望看到的杂质时,通常选择与杂志颜色相同的背景光源颜色,这样可以在视觉效果上滤除杂质干扰。
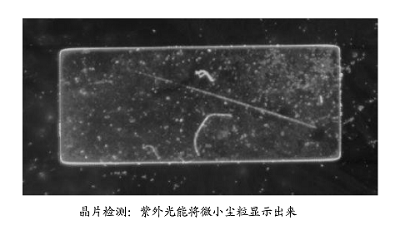
检测微小尘粒时,紫外光是一个良好选择。例如在晶片尘粒检测时,通常用到紫外光。
2. 照明方式
良好的照明方式应该保证需要检测的特征突出于其他背景。照明方式有很多中,例如前向照明、背向照明、同轴光照明等,根据不同的应用背景,不同的照明方式直接与项目成败相关。
当需要突出物体轮廓时,通常采用背向照明,即被观察物位于光源和高速相机之间。
背向照明可获得物体轮廓
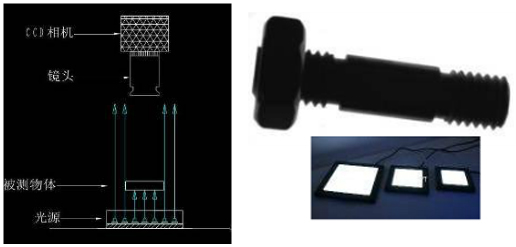
当需要观察物体表面细节时,通常采用前向照明,使光源和高速相机位于被观察物的同侧。前向照明也可根据光源角度不同分为同轴光照明和其他方式的漫反射照明等;当光源呈多角度照射在物体表面时,可以突出物体表面的凹凸细节;同轴光比传统光源更均匀的照明,同时避免物体的反光。
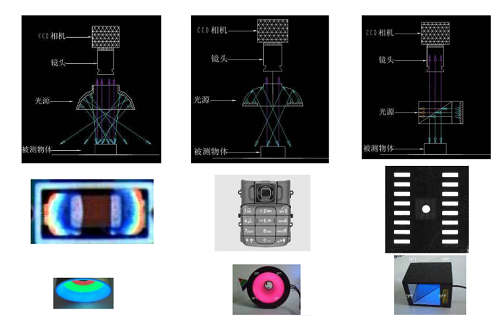
多种方式的前向照明
此外,在一些特殊应用场合,灵活使用定制的照明方式也很重要。例如,为了节省光源和高速相机的摆放空间同时又达到光源从一定角度照射的效果,可使用反射镜,仰望科技自主研发的焊缝跟踪系统将高速相机和激光线发射器固定在一个小盒子内,通过一个反射镜改变激光线方向,使激光线和高速相机光轴方向呈大角度,以便针对焊缝进行激光三角测量。
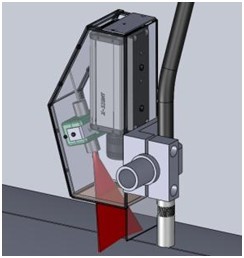
焊缝跟踪照明系统
3. 其他要素
光源的亮度、鲁棒性也是光源选型中不可忽略的要素。
亮度:当选择两种光源的时候,最佳的选择是选择更亮的那个。当光源不够亮时,可能有三种不好的情况会出现。第一,高速相机的信噪比不够;由于光源的亮度不够,图像的对比度必然不够,在图像上出现噪声的可能性也随即增大。其次,光源的亮度不够,必然要加大光圈,从而减小了景深。另外,当光源的亮度不够的时候,自然光等随机光对系统的影响会最大。
鲁棒性:是指光源是否对部件的位置敏感度最小。当光源放置在摄像头视野的不同区域或不同角度时,结果图像应该不会随之变化。方向性很强的光源,增大了对高亮区域的镜面反射发生的可能性,这不利于后面的特征提取。
好的光源需要能够使你需要寻找的特征非常明显,除了是高速相机能够拍摄到部件外,好的光源应该能够产生最大的对比度、亮度足够且对部件的位置变化不敏感。光源选择好了,剩下来的工作就容易多了。当然,具体的光源选型方法还在于试验的实践经验。